PENGANTAR
Bab I. Pendahuluan Sistim Kendali
Tujuan
Setelah Mempelajari bab ini, mahasiswa mampu untuk:
-
Menjelaskan perbedaan antara sistim kendali ikal terbuka dan ikal tertutup (open-loop dan closed-loop control systems)
-
Menerangkan diagram blok dari sistim kendali
-
Menjelaskan Fungsi Transfer
-
Membedakan antara sistim kendali Analog dan Digital
-
Menjelaskan cara kerja dari sistim kendali
-
Menjelaskan cara kerja dari sistim mekanisme servo
1.1. SISTIM-SISTIM KENDALI
Pengantar dan Latar Belakang
Pada sistim-sistim kendali moderen, kecerdasan kendali elektronik mengendalikan proses-proses fisik. Sistim-sistim kendali adalah “otomatis” seperti pada sistim pilot otomatis dan mesin
cuci otomatis. Operator memiliki banyak waktu luang selama mengoperasikan sistim-sistim ini disebabkan mesin dapat melakukan pengambilan keputusan sendiri secara rutin. Dalam banyak kasus, kecerdasan mesin ternyata lebih handal daripada kendali yang dilakukan langsung oleh manusia disebabkan oleh mesin-mesin ini dapat bereaksi dengan lebih cepat atau lebih perlahan (mengikuti lintasan dengan perubahan yang lambat), tanggapan lebih tepat dan mempertahankan catatan yang akurat dari kinerja sistim.
Sistim kendali dapat diklasifikasikan dalam beberapa cara. Sistim Regulator secara otomatis mempertahankan suatu parameter pada (atau mendekati) suatu nilai tertentu. Sebagai contoh, sistim pendingin ruangan yang mempertahankan suhu ruangan walaupun terjadi perubahan suhu disekitarnya. Sistim Follow-Up (pengikut), secara otomatis mengatur keluaran sistim untuk mengikuti suatu lintasan yang telah ditentukan terlebih dahulu. Sistim Event, mengendalikan serangkaian urutan event (peristiwa). Sebagai contoh, kendali siklus kerja mesin cuci yang berlangsung mengikuti urutan-urutan kerja yang telah diatur sebelumnya.
Sistim kendali alamiah sudah ada sejak kehidupan dimulai. Tinjau bagaimana tubuh manusia mengatur suhu badan. Jika tubuh memerlukan panas, maka kalori dari makanan diubah menjadi panas; sebaliknya, penguapan keringat menghasilkan pendinginan. Disebabkan karena penguapan menjadi kurang efektif terutama pada daerah-daerah dengan kelembaban tinggi, maka tidak heran jika suhu tubuh manusia yang sebesar 36.7 °C / 98 °F berada pada jangkauan atas dari spektrum suhu permukaan bumi (untuk mengurangi keperluan pendinginan). Jika sensor suhu pada tubuh mendeteksi penurunan suhu, otak akan memerintahkan tubuh untuk membakar lebih banyak kalori. Jika sensor suhu mendeteksi bahwa suhu tubuh terlalu panas, maka otak akan memerintahkan tubuh untuk berkeringat.
Sistim kendali buatan manusia sudah ada sejak jaman dulu, pada masa Yunani kuno. Peralatan yang menarik pada masa itu adalah penampungan / kolam air yang tidak pernah dapat dikosongkan. Penampungan menggunakan sistim katup apung yang mirip dengan sistim bak penyiraman toilet. Pada saat permukaan air turun, katup apung turun dan membuka untuk mengisi penampungan.
Sistim kendali elektronik adalah produk abad ke-20. Relay-relay elektro-mekanis dikembangkan dan digunakan untuk kendali jarak jauh bagi motor-motor listrik dan peralatan lainnya. Relay dan saklar-saklar listrik juga digunakan pada gerbang-gerbang logika sederhana untuk memperoleh sedikit kecerdasan sistim. Dengan menggunakan teknologi tabung hampa, pengembangan yang berarti dari sistim-sistim kendali dicapai pada masa Perang Dunia II. Sistim kendali posisi dinamis (mekanisme servo) dikembangkan untuk aplikasi pada pesawat udara, pemutar senjata, dan torpedo. Sekarang ini, sistim kendali posisi digunakan pada mesin-mesin produksi, proses-proses industri, robot, mobil dan alat-alat kantor, ini hanya merupakan sebagian kecil dari banyak sekali contoh yang ada.
Sementara itu, perkembangan-perkembangan dalam bidang eletronika mempengaruhi rancangan sistim kendali. Peranti elektronika peranti padat (solid-state) digunakan untuk menggantikan relay-relay konvensional yang digunakan pada rangkaian-rangkaian kendali motor-motor listrik. Transistor dan Integrated Circuit Operational Amplifier (IC Op-Amp) tersedia untuk aplikasi pengendali-pengendali analog. Rangkaian terintegrasi digital menggantikan rangkaian logika relay yang menyita ruangan. Yang terakhir yang mungkin yang paling penting adalah bahwa mikroprosesor memberikan kemampuan untuk membuat pengendali digital dengan harga murah, yang handal, dan mampu mengendalikan proses-proses yang rumit dan bersifat fleksible (jika proses berubah, maka pengendali dapat di program ulang).
Sistim kendali mencakup banyak sekali bidang-bidang ilmu terkait: elektronika (analog dan digital), peranti kendali daya, sensor-sensor, motor listrik, sistim-sistim mekanis dan teori sistim kendali, yang menyatukan seluruh komponen yang terkait.
Setiap sistim kendali paling sedikit memiliki satu pengendali (controller) dan satu aktuator (juga disebut sebagai elemen kendali akhir). Hal ini ditunjukkan pada Gambar 1.1. Kecerdasan sistim pada blok pengendali biasanya adalah rangkaian elektronika. Masukan kepada sistim (input) biasanya disebut set-point, yakni sinyal yang mewakili besaran keluaran (output) yang diinginkan. Aktuator merupakan peranti elektro-mekanis yang menerima sinyal dari pengendali dan mengubahnya menjadi suatu aksi fisik. Contoh-contoh aktuator meliputi, motor-motor listrik, katup terkendali listrik, atau elemen pemanas. Blok akhir pada Gambar 1.1 dinamai Process dan memiliki output yang dinamai controlled variable (variabel yang dikendalikan). Blok Proses mewakili proses fisik yang dipengaruhi oleh aktuator, dan variabel yang dikendalikan merupakan keluaran terukur dari proses tersebut. Sebagai contoh, jika aktuator adalah elemen pemanas pada suatu tungku di industri, maka prosesnya adalah “pemanasan tungku,” dan variable yang dikendalikan adalah suhu tungku. Jika aktuator adalah motor listrik yang mengatur posisi antenna maka prosesnya adalah “memutar antenna,” dan variabel yang dikendalikan adalah posisi angular dari antene.
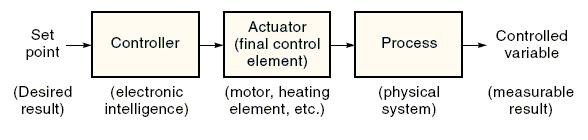
Gambar 1.1. Diagram Blok Dasar Sistim Kendali
Sistim Kendali Ikal Terbuka (Open-Loop Control Systems)
Secara umum sistim-sistim kendali dapat dibagi dalam dua kategori: sistim kendali ikal terbuka dan sistim kendali ikal tertutup. Dalam suatu sistim kendali ikal terbuka, pengendali secara terpisah menghitung / mengatur besarnya tegangan atau arus yang diperlukan oleh aktuator untuk melaksanakan fungsinya. Dengan cara ini, pengendali sama sekali tidak mengetahui jika aktuator melakukan fungsinya dengan benar ataukah tidak, disebabkan tidak adanya jalur umpan-balik (feedback) yang digunakan.
Contoh 1.1
Gambar 1.2 menunjukkan suatu sistim kendali ikal terbuka. Aktuator adalah sebuah motor untuk menggerakan lengan robot. Dalam kasus ini, proses-nya adalah pergerakan lengan robot, dan variabel yang dikendalikan adalah posisi angular dari lengan. Pengujian awal menunjukan bahwa motor memutar lengan sejauh 5 derajat / detik (°/det) dengan besarnya tegangan yang telah ditentukan. Diasumsikan bahwa pengendali diperintahkan untuk memutar lengan robot dari posisi 0° ke posisi 30°. Berdasarkan hal ini maka pengendali mengirimkan pulsa listrik selama 6 detik ke motor. Motor bekerja sebagaimana mestinya, memutar lengan sejauh 30°
dalam waktu 6 detik dan berhenti. Namun pada suhu ruangan yang dingin, cairan pelumas menjadi lebih kental, yang memperbesar gaya gesek yang terjadi pada mekanisme lengan, hal ini menyebabkan motor hanya dapat berputar sejauh 25° dalam waktu 6 detik; terjadi kesalahan (error) hasil operasi sebesar 5°. Dalam hal ini, pengendali tidak memiliki cara untuk mengetahui terjadinya kesalahan (error) dan bagaimana mengoreksinya.
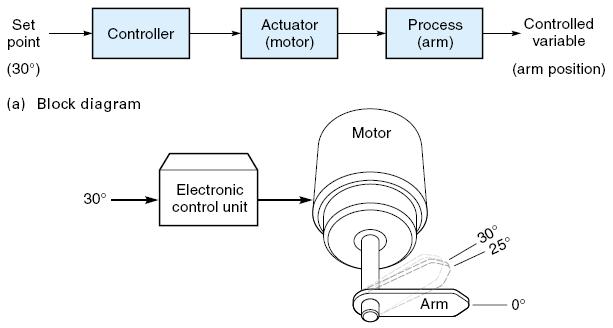
Gambar 1.2. Sistim Kendali Ikal Terbuka (Open-loop Control System)
Sistim Kendali Ikal Tertutup (Closed-loop Control Systems)
Dalam sistim kendali ikal tertutup, keluaran (output) dari proses (variabel yang dikendalikan) secara konstan dipantau dengan menggunakan sensor, seperti yang ditunjukkan pada Gambar 1.3(a). Sensor mengambil sampel keluaran dari sistim dan mengubah hasil pengukuran ini menjadi sinyal listrik yang selanjutnya dikirim kembali ke pengendali. Dengan demikian, pengendali mengetahui apa yang dilakukan oleh sistim, sehingga pengendali dapat melakukan koreksi atau pengaturan yang diperlukan untuk mempertahankan kestabilan output. Aliran sinyal dari pengendali ke aktuator mengikuti lintasan maju (forward path) dan sinyal dari sensor ke pengendali mengikuti lintasan umpan-balik (feedback) yang membentuk suatu lintasan ikal tertutup.
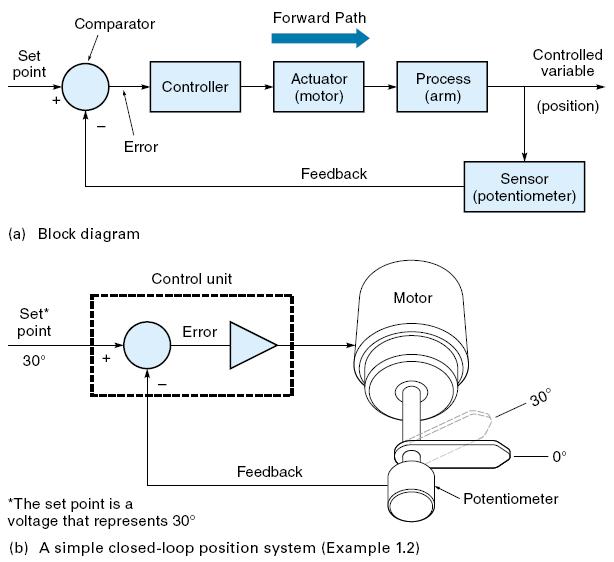
Gambar 1.3. Sistim Kendali Ikal Tertutup (Closed-loop Control System)
Dalam Gambar 1.3 (a), sinyal umpan-balik (feedback) di kurangkan dengan nilai dari nilai set-point pada komparator (yang berada sebelum pengendali). Dengan mengambil selisih antara posisi aktual (yang diberikan oleh sensor) dari posisi yang diinginkan (yang ditentukan melalui nilai set-point), diperoleh tingkat kesalahan (error) sistim. Sinyal error mewakili perbedaan antara “dimana sistim sekarang berada” dan “dimana sistim seharusnya berada”. Pengendali selalu bekerja untuk memperkecil besarnya sinyal error. Jika sinyal error = 0 ini berarti bahwa keluaran (output) tepat sama dengan set-point, artinya sistim berada pada keadaan yang diinginkan sesuai dengan nilai set point.
Penggunaan strategi kendali, dapat dalam bentuk sederhana maupun rumit, pengendali selalu berfungsi untuk memperkecil besarnya error. Suatu strategi kendali sederhana dapat digunakan untuk mengatur aktuator untuk on dan off – contoh, siklus on-off termostat untuk mempertahankan suhu pada proses pemanasan tungku. Untuk strategi kendali yang rumit, dapat berupa pengaturan daya aktuator oleh pengendali untuk memenuhi penggunaan daya oleh beban seperti diberikan pada contoh 1.3.
Contoh 1.2
Tinjau kembali sistim ikal tertutup pada Gambar 1.3(b). Lengan robot berada pada posisi 0° dan potensiometer (pot) dihubungkan langsung pada poros motor. Bila poros berputar, resistansi pot berubah. Resistansi selanjutnya diubah menjadi tegangan dan di umpan-balikan kepada pengendali. Untuk menginstruksikan lengan berputar sejauh 30°, suatu nilai set-point yang berhubungan langsung dengan posisi 30° dikirim ke pengendali. Karena lengan sementara berada pada posisi 0°, maka sinyal error akan dengan segera “melompat” ke 30°. Berikutnya, dengan segera pengendali mulai menjalankan motor dalam arah untuk mengurangi error. Pada saat lengan mendekati posisi 30°, pengendali mengurangi kecepatan putar motor, dan pada saat lengan mencapai posisi 30°, motor berhenti. Jika beberapa saat kemudian, gaya luar memindahkan lengan dari posisi 30°, sinyal error terjadi lagi, dan motor akan digerakkan kembali ke posisi 30°.
Fungsi koreksi diri dari sistim kendali ikal tertutup menjadikannya cocok untuk banyak aplikasi kendali ikal tertutup, walaupun harus menggunakan peranti / peralatan tambahan. Hal ini disebabkan karena sistim kendali ilkal tertutup memiliki kehandalan dan konsistensi kinerja yang baik walaupun komponen sistim (dalam lintasan maju) tidak memiliki ketelitian mutlak yang diketahui. (bersambung ke kuliah-2)