MEKANISME SERVO
KENDALI GERAKAN
Kendali gerakan merupakan istilah dengan konteks yang luas yang dipergunakan untuk menjelaskan suatu sistim mekanis ikal terbuka atau ikal tertutup dimana terdapat bagian-bagian sistim yang bergerak.
Mekanisme Servo
Mekanisme servo merupakan istilah tradisional yang dipergunakan untuk menjelaskan suatu sistim kendali mekanis ikal tertutup yang mengatur gerak presisi dari suatu obyek fisik seperti antene radar atau lengan robot. Biasanya, baik keluaran posisi atau keluaran kecepatan (atau keduanya) dikendalikan oleh pengendali. Sebagai contoh suatu sistim mekanisme servo untuk mengatur posisi antene radar seperti yang dtunjukkan pada Gambar 1.11. Dalam contoh ini, variabel yang dikendalikan adalah posisi antene. Antene diputar dengan menggunakan motor listrik yang terhubung ke pengendali yang berada dalam jarak tertentu. Operator memilih arah antene yang diinginkan dan selanjutnya pengendali memutar antene ke arah yang dinginkan.
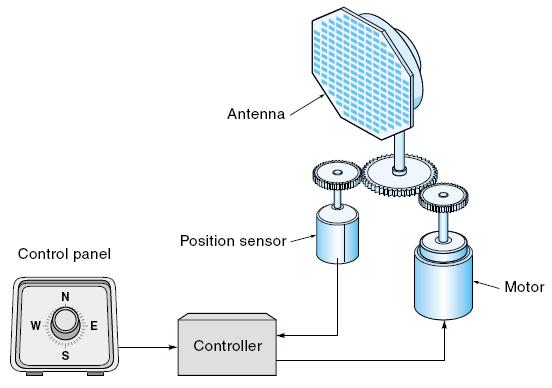
Gambar 1.11. Mekanisme Servo Untuk Mengatur Posisi Antene Radar
Kendali Numerik (Numerical Control)
Kendali numerik merupakan jenis kendali digital digunakan pada mesin-mesin produksi seperti mesin bubut dan mesin frais. Mesin-mesin ini secara otomatis dapat memotong dan membentuk benda kerja tanpa campur tangan operator. Masing-masing mesin memiliki seperangkat sumbu atau parameter-parameter yang harus dikendalikan; sebagai contoh, mesin frais yang ditunjukkan dalam Gambar 1.12. Benda kerja dikunci pada meja kerja yang dapat digerakkan. Meja kerja dapat digerakkan (menggunakan motor listrik) dalam tiga arah sumbu: X, Y, dan Z. Kecepatan gerak alat pemotong secara otomatis dikendalikan juga. Untuk membuat suatu benda kerja, meja kerja menggerakkan benda kerja melewati pisau pemotong pada kecepatan tertentu dan pada kedalaman potong tertentu pula. Dalam contoh ini, terdapat empat parameter (X, Y, Z, dan RPM) yang secara kontinyu dan terpisah-pisah dikendalikan oleh pengendali. Sebagai input bagi pengendali adalah serangkaian angka-angka yang secara lengkap menjelaskan bagaimana benda kerja harus dikerjakan. Angka-angka ini termasuk didalamnya ukuran-ukuran dimensi fisik dan detail-detail kerja seperti kecepatan potong dan tingkat kedalaman pemotongan.
Mesin-mesin kendali numerik mulai dipergunakan sejak tahun 1960-an, dan standar-standar yang berhubungan dengan aplikasi telah mengalami banyak perubahan sejak itu. Awalnya, data dari gambar benda kerja dimasukkan secara manual ke komputer pengolah program. Program pada komputer mengubah serangkaian angka dari data input menjadi serangkaian angka-angka dan instruksi-instruksi yang dapat dimengerti oleh kendali numerik, dan selanjutnya data-data tersebut disimpan pada disk atau pita, atau dapat saja dikirim langsung ke kendali mesin pemotong, dibaca untuk pengerjaan pemotongan benda kerja.
Dengan ditemukannya sistim computer-aided design (CAD) / rancangan dibantu komputer, pekerjaan pemrogramman secara manual untuk memasukan instruksi-instruksi pembuatan benda kerja dapat ditiadakan. Sekarang ini dengan menggunakan program komputer khusus (disebut postprocessor) dapat dilakukan pembacaan gambar-gambar benda kerja yang dibuat oleh komputer dan selanjutnya dihasilkan instruksi-instruksi yang perlu untuk mesin kendali numerik untuk mengerjakan benda kerja. Keseluruhan proses ini – dari design dengan komputer (CAD) hingga penyelesaian benda kerja – disebut sebagai proses komputer-aided manufacturing (CAM) / manufaktur dibantu komputer.
Salah satu keuntungan utama dari proses ini adalah bahwa mesin produksi dapat secara efisien membuat banyak benda-benda kerja yang berbeda-beda, dari satu ke lainnya. Sistim seperti ini cenderung mengurangi penggunaan persediaan bahan baku dalam jumlah banyak. Jika data input dalam bentuk disket (atau program) tersedia, benda kerja yang diperlukan dapat dibuat dalam waktu singkat. Ini adalah satu contoh dari sistim computer-integrated manufacturing (CIM) / manufaktur dibantu komputer, suatu cara baru mengerjakan proses dalam industri manufaktur. CIM mencakup penggunaan komputer dalam setiap langkah operasi manufaktur – mulai dari pesanan pelanggan, pesanan bahan baku, pembuatan benda kerja, hingga pengirimannya ke tempat tujuan akhir.
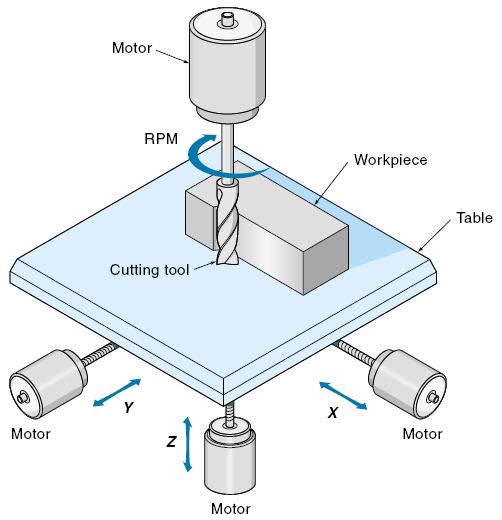
Gambar 1. 12. Prinsip Dasar Kendali Numerik Mesin Frais
Robot
Robot-robot industri merupakan contoh klasik dari sistim kendali posisi. Dalam banyak kasus, robot memiliki suatu lengan tunggal dengan bahu, sikut dan sambungan pergelangan, juga terdapat tangan tiruan atau capit yang disebut end effector. End effector dapat berupa pemegang / penjepit atau peralatan lain seperti alat penyemprot cat. Robot-robot digunakan untuk memindahkan benda-benda kerja dari satu tempat ke tempat lain, memasang bagian-bagian dari suatu peralatan dan untuk meletakan dan mengambil benda kerja ke dan dari mesin kendali numerik dan juga dapat digunakan untuk melakukan kerja pengecatan dan pengelasan.
Robot-robot jenis pick-and-place (ambil dan letakkan), merupakan jenis yang paling sederhana, tugasnya mengambil benda kerja dan meletakkannya kembali di suatu tempat. Robot-robot jenis ini tidak banyak menggunakan peralatan kendali ikal tertutup yang rumit, kebanyakan hanya menggunakan kendali ikal terbuka dengan bantuan saklar-saklar pembatas untuk mengatur dan menentukan seberapa jauh robot dapat bergerak dalam arah tertentu (sering disebut sebagai “ sistim bang-bang “). Salah satu contoh robot jenis ini ditunjukkan dalam Gambar 1.13. Robot ini menggunakan tenaga dari silinder pneumatik untuk mengangkat, memutar dan memperpanjang lengannya. Robot ini dapat diprogram untuk mengulangi serangkaian urutan langkah-langkah kerja yang sederhana.
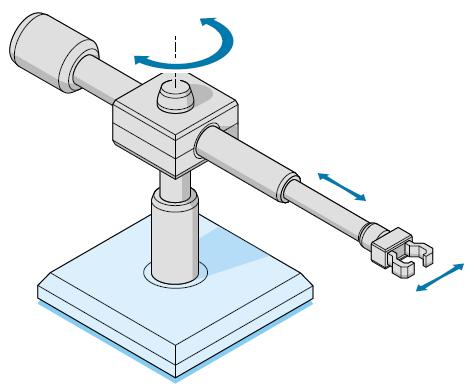
Gambar 1.13. Contoh Robot Pick-and-Place / Ambil dan Letakkan
Robot-robot yang rumit menggunakan kendali posisi ikal tertutup untuk seluruh sambungan lengannya. Contoh dari robot industri jenis ini ditunjukkan pada Gambar 1.14. Robot memiliki 6 sumbu yang dapat dikendalikan (dikenal juga sebagai robot dengan 6 derajat kebebasan), yang memungkinnya untuk mencapai posisi-posisi yang sulit. Robot tersedia dengan alat pengendali dalam bentuk pengendali khusus berbasis komputer. Sistim ini juga memiliki kemampuan untuk menerjemahkan instruksi-instruksi manusia menjadi instruksi program robot melalui proses “teaching / pembelajaran”. Lengan robot dari berpindah dari satu titik ke titik lainnya dengan kecepatan yang telah ditentukan dan mencapai posisi titik tersebut dengan ketelitian sampai 1/1000 milimeter.
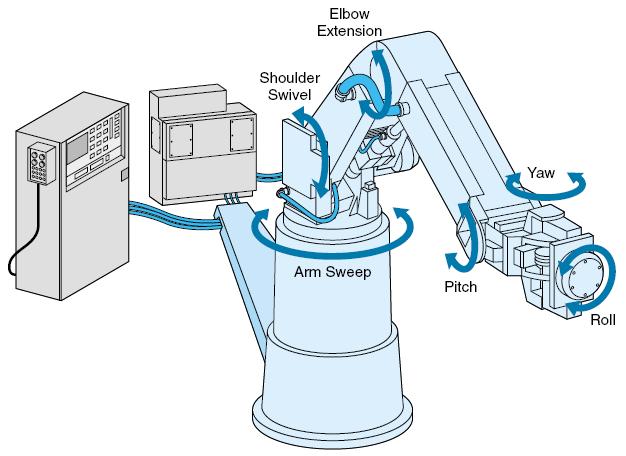
Gambar 1.14. Contoh Sistim Robot Industri Lengkap
RINGKASAN
Sistim kendali adalah suatu sistim dimana kecerdasan elektronika dipergunakan untuk mengendalikan suatu proses fisik. Uraian ini mencakup keseluruhan fase dari sistim kendali: elektronika, sumber tenaga (mis. motor listrik), mekanisme, dan teori sistim kendali yang menyatukan semuanya menjadi keseluruhan konsep.
Sistim kendali dijelaskan dalam bentuk diagram blok. Blok pertama adalah pengendali, yang mewakili kecerdasan eletronika. Keluaran atau output pengendali adalah sinyal kendali yang dikirimkan ke blok berikutnya, yakni aktuator. Aktuator merupakan peranti fisik pertama dari sistim yang melakukan sesuatu proses (mis. motor listrik atau elemen pemanas).
Terdapat dua kategori umum dari system-sistem kendali: ikal terbuka (open-loop) dan ikal tertutup (closed-loop). Pada kendali ikal terbuka, pengendali mengirimkan sinyal terukur, menentukan aksi yang diinginkan kepada actuator (dalam hal pengendali tidak mengetahui apa yang dilakukan oleh aktuator). Kendali ikal tertutup menggunakan sensor yang mengumpan-balik suatu sinyal dari aktuator kepada pengendali, memberitahukan pengendali mengenai tepatnya apa yang dilakukan oleh aktuator. Hal ini memberikan kemampuan kepada pengendali untuk melakukan koreksi-koreksi atau pengaturan-pengaturan.
Masing-masing komponen dalam sistim kendali dapat dijelaskan secara matematis dengan menggunakan fungsi transfer (TF), dimana TF=output/input. Fungsi-fungsi transfer dari masing-
masing komponen dapat digabungkan untuk menghitung kinerja seluruh sistim. Suatu fungsi transfer yang sebenarnya mengandung karakteristik sistim dari segi time-dependent dan steady state, untuk penyederhanaan yang bermanfaat (yang digunakan dalam uraian ini) hanya meninjau keadaan-keadaan steady-state.
Sistim-sistim kendali diklasifikasikan juga sebagai sistim kendali analog atau sistim kendali digital. Pada sistim kendali analog, rangkaian elektronik analog yang digunakan terdiri dari amplifier (penguat). Pada sistim kendali digital, pengendali menggunakan rangkaian digital, biasanya dalam bentuk komputer.
Sistim-sistim kendali juga diklasifikasikan berdasarkan jenis aplikasinya. Kendali proses biasanya mengacu pada proses-proses industri yang dikendalikan secara elektronik untuk keperluan mempertahankan hasil keluaran yang benar dan seragam. Kendali gerak mengacu kepada kendali gerakan suatu obyek. Suatu mekanisme servo adalah sistim kendali umpan-balik (feedback) yang menyediakan kendali gerak jarak jauh untuk beberapa obyek, seperti lengan robot atau antene radar. Sistem kendali numerik mengatur suatu mesin produksi misalnya mesin bubut untuk membuat benda kerja secara otomatis.