Kesalahan Pengukuran oleh Transduser dan Proses
5. 3. Kesalahan Akibat Pengaruh Transduser pada Proses
Transduser harus dipilih dan ditempatkan dengan cara tertentu sehingga tidak mempengaruhi atau mengubah proses pengukuran. Jika pemasangan dari transduser-transduser mempengaruhi proses, maka kesalahan yang serius dapat terjadi dan hasil pengukuran yang diperoleh akan tidak memiliki arti. Untuk kebanyakan pengukuran, ukuran dan berat dari transduser haruslah kecil relatif terhadap ukuran dan berat dari komponen yang diuji. Selain itu transduser juga harus hanya memerlukan gaya yang kecil atau mengambil energi yang sesedikit mungkin dari proses untuk dapat bekerja.
Untuk mengilustrasikan kesalahan pengukuran yang dapat terjadi akibat pengaruh transduser. Tinjau suatu percobaan yang dirancang untuk mengukur frekuensi yang berhubungan dengan modus dasar dari getaran suatu plat bundar dengan penjepit pada tepi plat bundar tersebut. Persamaan 1) yang mengatur frekuensi modus pertama dari getaran plat bundar yang dijepit dengan tambahan massa terkonsentrasi pada pusat plat adalah:
![]() (6)
(6)
dimana :
|
ω |
frekuensi angular |
|
λ |
konstanta yang tepergantung pada perbandingan dari massa terkonsentrasi pada pusat plat dengan massa plat |
|
a |
radius dari plat |
|
ρ |
rapat massa per unit luas dari plat |
|
D |
ukuran kekerasan bahan plat. |
|
E |
modulus elastisitas dari bahan plat |
|
v |
bilangan Poisson dari bahan plat |
|
h |
ketebalan plat |
1) A. W. Leissa, “Vibration Plates”, NASA SP-160, 1969, p. 19
Untuk eksperimen ini, nilai untuk konstanta 2 tergantung dari perbandingan massa terkonsentrasi dari accelerometer ma terhadap massa dari plat mp. Untuk nilai ma/mp sama dengan 0, 0.05, 0.10, sedangkan nilai konstanta 2 sama dengan 10.214, 9.012, dan 8.111 dan seterusnya. Dengan demikian kesalahan dalam pengukuran frekuensi natural pertama ini, adalah disebabkan oleh massa pengukur kecepatan (accelerometer). Kesalahan tersebut dapat dihitung sebagai berikut:
![]() dan
dan
![]()
Jelas dari contoh ini bahwa massa dari transduser menunjukkan efek yang nyata pada proses getaran, dan kesalahan yang cukup berarti dapat terjadi akibat pengaruh massa transduser. Guna mencegah kesalahan pengukuran jenis ini maka massa dari transduser pada kasus ini tidak boleh melebihi nilai 1 % dari massa plat yang diukur frekuensi naturalnya.
5. 4. Kesalahan Pengukuran Akibat Sensivitas Ganda dari Transduser
Transduser biasanya dirancang untuk mengukur suatu besaran tunggal tertentu seperti tekanan; walaupun demikian sering terjadi bahwa karena kepekaannya maka transduser dapat pula turut mengukur besaran lain seperti suhu atau percepatan. Jika transduser yang digunakan untuk mengukur suatu besaran misalnya tekanan pada suatu proses dan jika perubahan suhu juga menyebabkan perubahan dalam pengukuran, maka kesalahan akibat kepekaan ganda akan terjadi. Efek dari sensivitas ganda diperlihatkan melalui ilustrasi kurva tanggapan input-output pada Gambar 7. Seperti yang ditunjukkan pada gambar dua jenis kesalahan muncul akibat adanya efek kepekaan ganda. Dua besaran yang mempengaruhi transduser berubah bersamaan selama periode pengukuran. Yang pertama, pergeseran nol terjadi akibat perubahan besaran sekunder. Yang kedua, terjadinya perubahan pada kepekaan transduser. Kesalahan-kesalahan ini diperlihatkan pada Gambar 7. Kedua hal ini dapat saja terjadi pada suatu transduser yang dirancang kurang baik.
Dalam beberapa percobaan, perubahan pada besaran sekunder berubah sebagai fungsi dari waktu. Dalam kasus ini, nilai zero-offset dan kepekaan juga berubah sebagai fungsi dari waktu. Perubahan pada zero-offset dikenal dengan istilah zero-drift. Sensivitas atau kepekaan yang berubah-ubah disebut sebagai sensivity drift. Sangatlah sulit untuk melakukan suatu pengukuran yang teliti dalam kondisi seperti ini, karena terdapatnya perubahan yang terus menerus pada nilai standar nol dan konstanta kalibrasi dari sistem instrumentasi sehingga meniadakan kemungkinan untuk melakukan suatu koreksi tersendiri bagi pengaruh dari besaran sekunder. Suatu pendekatan yang baik adalah dengan secara hati-hati dan teliti memilih jenis tranduser sehingga keberadaan sensivitas untuk besaran sekunder benar-benar dapat diabaikan. Selain itu juga sebaiknya elemen-elemen lain dari keseluruhan sistem harus ditutup, dan jika mungkin ditempatkan pada ruangan yang suhunya dapat diatur.
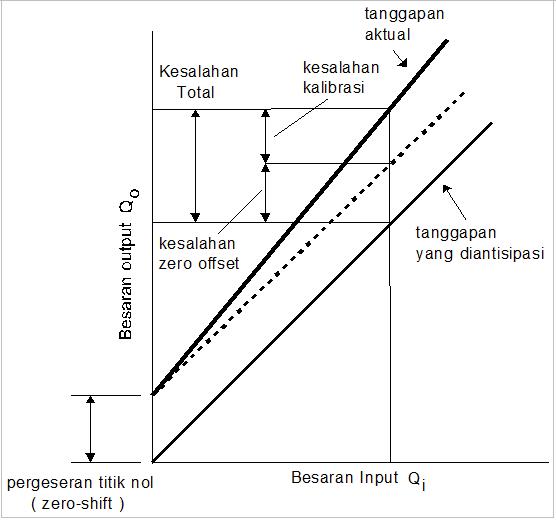
Gambar 7. Perubahan tanggapan dari suatu instrumen akibat efek kepekaan ganda
Tujuan dari uraian ini adalah berfokus pada kepekaan ganda dari transduser, selain itu harus juga diketahui bahwa seluruh bagian atau elemen sistem instrumentasi juga menghasilkan efek kepekaan ganda ini. Fenomena kepekaan ganda dari bagian-bagian lain ini, menjadi masalah yang penting jika dilakukan suatu percobaan yang memerlukan waktu yang lama (beberapa hari atau beberapa minggu). Waktu menjadi besaran sekunder dan stabilitas dari bagian-bagian seperti penyesuai sinyal, catu daya, penguat dan perekam mempengaruhi ketelitian dari pengukuran yang dilakukan. Diketahui bahwa zero drift akan terjadi pada kebanyakan instrumen, khususnya pada penguat, maka persiapan-persiapan khusus harus dilakukan utnuk suatu kondisi percobaan yang berlangsung dalam waktu yang lama, untuk itu secara periodik perlu dilakukan pemeriksaan dan penetapan ulang nilai standar nol atau koreksi nilai zero shift.
5. 5. Sumber-Sumber Kesalahan Lain
Sumber-sumber kesalahan lain yang penting adalah: efek dari kawat penghantar, derau atau noise elektronik, dan kesalahan manusia.
Pengaruh kawat penghantar yang digunakan utnuk menghubungkan transduser ke sistem instrumensi, dapat menjadi berarti jika transduser yang digunakan mengandung elemen yang peka terhadap perubahan resistansi. Resistansi kawat-kawat penghantar yang panjang dan kecil akan sangat berpengaruh terhadap transduser untuk mengukur resistansi resistansi. Penambahan nilai resistansi dari kawat penghantar akan mempengaruhi kepekaan dan konstanta kalibrasi dari suatu transduser. Kawat penghantar dapat pula menghasilkan kesalahan pengukuran yang tidak diinginkan akibat pengaruh suhu yang pada gilirannya menyebabkan perubahan nilai resistansi dari kawat penghantar tersebut. Jika suatu kawat penghantar panjang digunakan pada lengan-lengan dari suatu jembatan Wheatstone yang digunakan untuk pengukuran pembebanan, maka ketelitian dari pengukuran ini jenis ini dapat dengan mudah diatur.
Derau atau noise elektronik yang biasanya dihasilkan dari sinyal-sinyal yang dipancarkan dari sumber-sumber sinyal listrik lainnya dapat juga dipungut atau ikut terbawa oleh suatu kawat penghantar panjang. Jika kawat penghantar ditempatkan cukup dekat dengan peralatan-peralatan listrik lain seperti: motor listrik atau lampu, maka perubahan medan magnetik pada alat-alat tadi dapat menghasilkan perbedaaan tegangan listrik rendah pada kawat penghubung yang dapat memperbesar tegangan listrik yang diterima dari transduser yang dihubungkan oleh kawat tersebut. Disebabkan oleh level sinyal hasil pengukuran yang biasanya sangat kecil, maka kesalahan yang diakibatkan oleh derau dari kawat dapat sangat berpengaruh. Derau yang terbawa oleh kawat dapat ditekan serendah mungkin dengan menggunakan kawat berpelindung (shielded cable), yang membatasi kawat penghantar dari perubahan-perubahan medan magnet disekitar kawat tersebut. Pada beberapa jenis pengukuran dimana sinyal hasil pengukuran sangat kecil, derau dari kabel berpelindung masih tetap merupakan masalah, maka penggunaan teknik elektronika khusus seperti penggunaan Notch-Filter sangat diperlukan guna menghilangkan derau terutama derau dari jalur PLN berupa frekuensi AC 50 - 60 Hertz.
Sumber lain dari kesalahan juga dapat disebabkan oleh kesalahan operator. Operator harus dengan benar mencatat kepekaan S dari setiap bagian atau elemen pada suatu sistem instrumentasi dan juga harus dengan teliti mengatur titik nol pada setiap elemen. Output yang ditampilkan pada alat perekam harus dibaca dan sering pada pekerjaan ini terjadi kesalahan pembacaaan, kesalahan pembacaan akibat kesalahan parallax sebesar 1 atau 2 % adalah merupakan hal yang umum terjadi untuk kesalahan jenis ini.
6. Memperkecil Kemungkinan Terjadinya Kesalahan pada Percobaan
Prosedur-prosedur yang harus dilaksanakan untuk memperkecil kesalahan pada suatu sistem pengukuran adalah sebagai berikut:
-
Pemilihan jenis transduser dengan teliti. Berikan perhatian kepada ukuran, berat dan keperluan energi untuk memastikan bahwa transduser tidak mempengaruhi besaran yang akan diukur.
-
Periksa tingkat akurasi dari setiap elemen pada sistem instrumentasi. Hitunglah akumulasi kesalahan yang dapat diterima.
-
Kalibrasi setiap elemen di dalam sistem untuk memastikan bahwa semuanya bekerja di dalam standar spesifikasi masing-masing alat.
-
Uji proses yang akan dilakukan dan lingkungan pada mana sisten instrumentasi akan beroperasi. Berikan perhatian kepada perubahan suhu dan waktu yang diperlukan untuk lamanya pengukuran. Perkirakan kesalahan yang mungkin terjadi akibat efek kepekaan ganda dari transduser pada semua elemen pada sistem instrumentasi.
-
Hubungkan sistem dengan menggunakan kabel berpelindung. Gunakan prosedur pengawatan guna mengurangi kesalahan akibat kawat penghantar. Perkirakan kesalahan yang mungkin terjadi dari pengaruh kawat penghantar.
-
Periksa sistem terhadap keberadaan derau elektronik. Jika mungkin ubah kedudukan kabel-kabel penghantar atau sisipkan filter yang sesuai untuk mengurangi derau.
-
Laksanakan suatu proses kalibrasi bagi sistem dengan melakukan pengukuran variabel pada suatu proses yang diketahui, seperti yang diilustrasikan pada Gambar 8.
-
Estimasi kesalahan total pada sistem akibat seluruh sumber kesalahan yang diketahui.
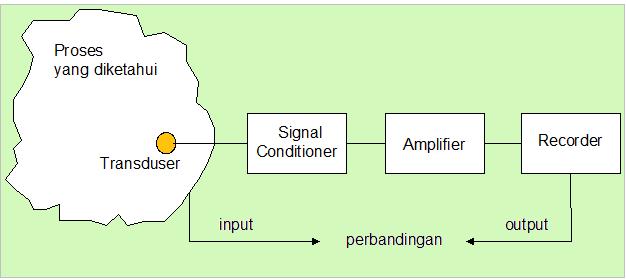
Gambar 8. Kalibrasi system dengan proses yang diketahui
Prosedur-prosedur ini tidak menjamin dicapainya suatu pengukuran yang benar-benar bebas dari kesalahan-kesalahan disebabkan karena beberapa jenis kesalahan tidak selalu seragam dalam suatu penentuan eksperimental dari besaran-besaran yang tidak diketahui; walupun begitu, prosedur-prosedur diatas memberikan suatu pendekatan yang sistematik untuk menekan kesalahan yang mungkin terjadi dan juga untuk memperkirakan jenis-jenis kesalahan yang ada pada suatu proses pengukuran.
7. Kesimpulan
Suatu sistem instrumentasi elektronik biasanya terdiri dari transduser, catu daya, penyesuai sinyal, penguat dan perekam. Sistem seperti ini digunakan secara eksperimental untuk menentukan suatu besaran yang tidak diketahui seperti gaya, tekanan, suhu, perpindahan dan lain-lain. Data atau output dari sistem instrumentasi dapat digunakan untuk kebutuhan analisa teknik dari suatu komponen mesin atau suatu struktur bangunan, guna proses monitor, proses kontrol loop terbuka, atau proses loop tertutup kontrol otomatis.
Kesalahan akan selalu terjadi di dalam suatu proses eksperimental untuk menentukan suatu besaran yang tidak diketahui. Kesalahan-kesalahan dapat berakumulasi akibat dari berbagai penyebab, seperti: jumlah kesalahan-kesalahan yang diketahui pada setiap elemen pada sistem, instrumen yang tidak berfungsi dengan benar, pengaruh transduser terhadap proses, atau fenomena kepekaan ganda dari transduser. Sistem pengukuran dengan tingkat ketelitian sebesar 0.1 hingga 1 % sangat mahal untuk kebanyakan penerapan. Pengukuran dengan tingkat ketelitian 2 hingga 5 % lebih realistik untuk dicapai jika saja prosedur-prosedur yang benar digunakan di dalam rancangan dan pemasangan sistem instrumentasi.
Sumber Pustaka :
Dally, J.W., Riley, W.F., & McConnell, K. G., (1984), Instrumentation for Engineering Measurements (pp. 1- 16), John Wiley & Sons, New York.
132125676 (c) 2005 - 2012