Sistem Kendali Proporsional Analog
BIAS
Salah satu cara untuk menangani masalah gravitasi adalah melalui penambahan suatu nilai konstan (untuk outputnya) yang cukup untuk menangani beban akibat grafitasi yang ada. Nilai ini disebut sebagai bias dan merupakan nilai yang sama yang diberikan kepada aktuator. Persamaan untuk suatu sistim kendali proporsional dengan bias adalah
![]() (1.3)
(1.3)
Nilai bias dianggap sebagai masukan tambahan kepada pengendali, seperti yang ditunjukkan pada diagram blok pada Gambar 1.13. Dimana beban 2 ft.lb memberikan beban sebesar 2 ft lb pada motor. Sinyal bias ( juga 2 ft lb) ditambahkan ke pada output dari pengendali dan memberikan sinyal bantuan untuk untuk mendukung beban. Sistim ini memberikan pengurangan error hingga nol karena beban statis ditopang oleh sinyal bias, dan bukannya bagian proporsional dari pengendali. Walaupun demikian, besarnya sinyal bias harus diubah apabila besar beban berubah.
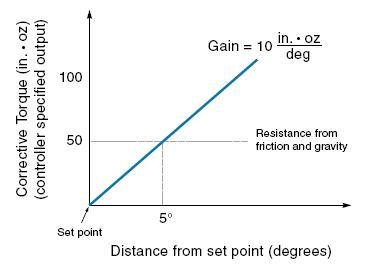
Gambar 1.12. Kekakuan untuk sistim kendali pada contoh 1.3
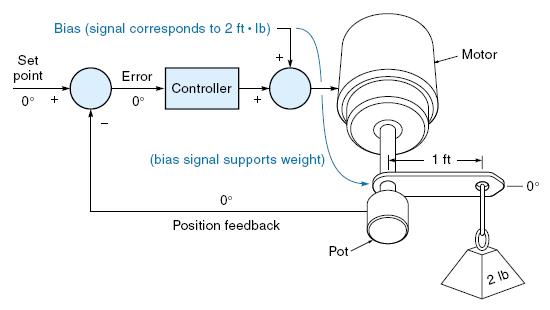
Gambar 1.13. Blok diagram sistim kendali dengan bias
Pengendali-Pengendali Proporsional Analog
Suatu pengendali analog umumnya menggunakan op-amp dengan gain yang cocok dan kemampuan mengolah sinyal. Sebagai contoh, tinjau suatu sistim kendali aliran seperti yang ditunjukkan pada Gambar 1.14(a). Tugas pengendali adalah untuk menjaga aliran cairan sepanjang pipa dengan kecepatan 6 gal/min. Sistim ini terdiri dari (1) katup yang diaktifkan secara elektrik, (2) sensor aliran, dan (3) pengendali proporsional. Katup dioperasikan dengan tegangan 0 – 5 V, dimana 0V katup menutup seluruhnya dan 5 V katup membuka penuh. Sensor aliran memberikan sinyal keluaran sebesar 0 – 5V, yang setara dengan aliran cairan 0 – 10 gal/min. Sistim dirancang sehingga tegangan sensor aliran berubah dalam daerah 2.5 V (50% dari jangkauannya) agar katup aliran dapat berubah dari tertutup ke membuka penuh. Dalam hal ini sistim memiliki lebar jalur proporsional sebesar 50%. Persentasi ini dapat ditransfer menjadi faktor gain (KP) dengan mengubah Persamaan 1.1:
![]()
![]()
Merupakan faktor gain yang proporsional.
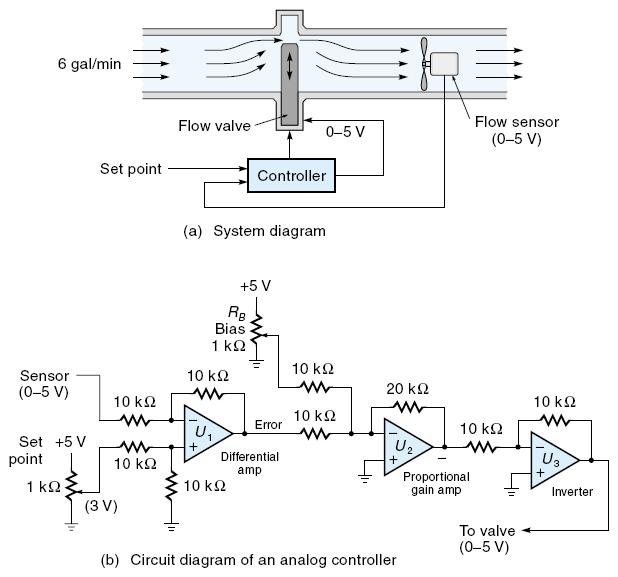
Gambar 1.14.Kendali analog untuk suatu sistim proporsional
Rangkaian kendali analog yang ditunjukkan pada Gambar 1.14(b) terdiri dari 3 op-amp. Op-Amp yang pertama (U1) berfungsi sebagai suatu differensial amplifier dengan gain sebesar 1. Op-Amp ini mengurangkan sinyal umpan balik dari sensor terhadap sinyal set point untuk memperoleh tegangan error. Untuk mempertahankan laju aliran sebesar 6 gal/min, maka set point harus sebesar 3 V DC seperti perhitungan dengan menggunakan fungsi transfer sensor:
![]()
Output atau keluaran dari U1 (sinyal error) dikirimkan ke op-amp U2, yang merupakan amplifier penjumlah membalik (inverting summing amplifier) dengan fungsi untuk menyediakan gain proporsional (KP). Untuk menghasilkan gain sebesar 2, maka rasio dari RF/RI (20kW/10kW) diatur sebesar 2. Catat bahwa potensiometer RB menambahkan tegangan bias jika diperlukan. Output dari U2 harus dibalikkan untuk menjadikannya positif; hal ini dilakukan dengan menggunakan U3, yang merupakan amplifier membalik (inverting amplifier) dengan gain sebesar satu.
132125676 (c) 2012