Stabilitas Sistem Kendali
Stabilitas
Sistim kendali yang stabil adalah sistim dimana variabel yang dikendalikan selalu berada atau mendekati nilai set point. Sistim kendali yang tidak stabil, adalah suatu sistim yang karena kondisi tertentu menyebabkan variabel yang dikendalikan begeser dari nilai set point atau berubah menjadi proses osilasi yang semakin membesar sehingga membuat sistim mencapai keadaan jenuh (saturation). Gambar 1.25 menunjukan respons dari sistim yang stabil dan sistim yang tidak stabil. Untuk sistim yang tidak stabil berada diluar kendali seehingga akan merupakan sistim yang berbahaya apalagi jika berhubungan dengan kendali pada mesin-mesin ukuran besar.
Banyak sekali contoh mengenai sistim yang mengalami osilasi atau mengalami ketidak stabilan dalam kehidupan kita sehari-hari. Bayangkan bagaimana kita berusaha untuk mempertahankan kedudukan sebuah bola diatas papan datar agar begerak dalam garis lurus. Jika bola berada di sisi kiri papan, kita akan memiringkan papan ke sisi kiri agar bola bergerak ke kiri, namum hal ini menyebabkan bola menggelinding melewati posisi yang kita inginkan, kita akhirnya harus kembali memiringkan papan ke sisi kanan untuk mengimbangi gerakan bola yang terlalu ke kiri, kembali bola bergerak ke kanan, namun akan kembali melewati posisi yang kita inginkan, dan kita akan kembali berusaha untuk mengimbangi gerakan bola dengan berulang-ulang memiringkan papan ke kiri dan ke kanan. Disini terlihat bahwa bola bergerak dalam pola osilasi dari kiri ke kanan atau kanan ke kiri dari posisi tengah papan datar.
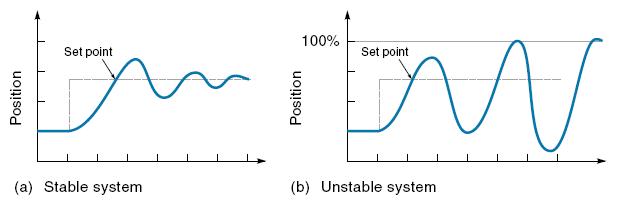
Gambar 1.25. Perbandingan antara Sistim Stabil (Stable) dan Tidak Stabil (Unstable)
Alasan utama mengapa suatu sistim kendali mengalami osilasi adalah karena terjadinya ketertinggalan fasa (phase lag) yang disebabkan oleh dead time, yakni terjadinya interval yang panjang antara waktu sinyal pengoreksi dikirim dan waktu yang diperlukan oleh sistim meresponnya. Contohnya mirip dengan keadaan mengemudikan mobil dengan kecepatan sedang pada suatu jalan sempit, untuk stir mobil yang normal, kita akan menggerakan stir sedikit-sedikit ke kiri atau ke kanan untuk menjaga agar mobil tetap berada di tengah jalan. Namun dengan kondisi jalan dan kecepatan yang sama tetapi dengan kondisi roda stir yang agak longgar pada poros kemudi, kita akan mengalami keadaan dimana kita perlu memutar roda kemudi agak jauh sebelum mobil mulai berbelok ke kiri atau ke kanan. Jika mobil melenceng ke kiri sedikit kita perlu memutar stir ke kanan dengan sudut putaran yang jauh lebih besar dari putaran stir yang normal, hal ini menyebabkan arah mobil akan menjadi terlalu ke kiri, untuk mengoreksinya kita kembali memutar stir ke kanan (dengan sudut putaran stir yang lebih besar lagi), mobil akan berubah arah ke kanan namun dengan arah belokan ke kanan yang lebih besar. Kita akan banting stir ke kiri lagi dengan lebih cepat. Perulangan banting stir ke kiri dan ke kanan ini akan semakin memperbesar belokan mobil dari posisi tengah jalan yang pada akhirnya akan menyebabkan mobil tidak dapat dikendalikan lagi.
Sistim kendali ikal tertutup menggunakan sistim umpan balik negatif artinya pengendali akan selalu berusaha untuk mengarahkan sistim pada posisi berlawanan yang sama besar dari kesalahan posisi yang terjadi. Jika variabel yang dikendalikan karena suatu sebab mengalami osilasi, maka gaya pengendalian harus ditahan sebesar 180° karena 180° adalah arah yang berlawanan (untuk sistim yang berputar). Jika terdapat dead time pada sistim, maka respons pengendali akan tertunda lebih dari 180°. Dengan kata lain, pada sistim yang mengalami osilasi, waktu tunda menyebabkan terjadinya penundaan fasa. Besar kecilnya penundaan fasa tergantung kepada frekuensi kerja sistim. Sebagai contoh, misalkan suatu sistim kendali yang dipergunakan untuk mengendalikan sistim dengan frekuensi kerja 1 siklus per menit. Jika terdapat 1 detik ketertinggalan antara keluaran pengendali dengan respons sistim, maka penundaan yang terjadi belum terlalu terasa pada kerja sistim (seperti yang ditunjukkan pada Gambar 1.27(a)).
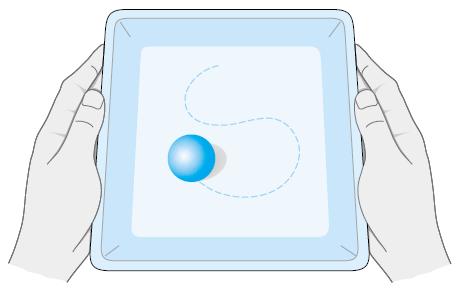
Gambar 1.26. Gerakan bola diatas papan datar menunjukkan kecenderungan sistim kendali untuk berosilasi
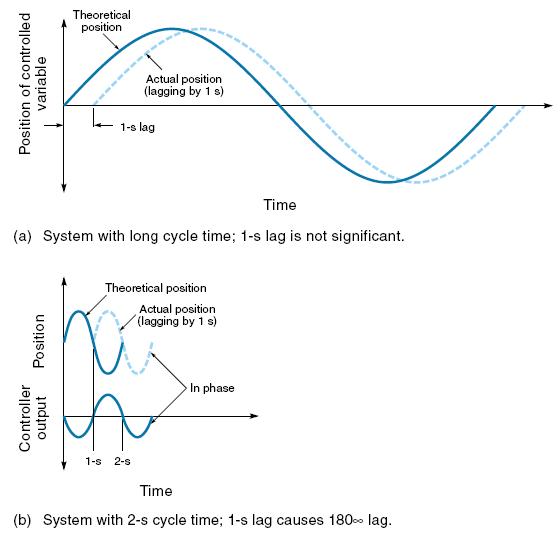 Gambar 1.27.Bagaimana penundaan dapat menyebabkan variabel yang dikendalikan menjadi satu fasa dengan keluaran pengendali
Gambar 1.27.Bagaimana penundaan dapat menyebabkan variabel yang dikendalikan menjadi satu fasa dengan keluaran pengendali
Namun, jika keseluruhan siklus kerja dari sistim hanya sebesar 2 detik, maka penundaan selama 1 detik menjadi sangat berpengaruh karena akan menambahkan satu fasa 180° sehingga menjadikannya berjumlah total 360°, seperti yang ditunjukkan oleh Gambar 1.27(b). Penundaan total sebesar 360° merupakan satu fasa yang sama, artinya sistim sekarang menjadi berada dalam kondisi umpan balik positif.
Umpan balik Positif terjadi apabila keluaran pengendali memiliki fasa yang sama dengan gerakan dari variabel yang dikendalikan, akibatnya bukannya memberikan gaya koreksi terhadap error yang terjadi, sebaliknya pengendali malahan membantu variabel yang harusnya dikendalikan untuk bergerak tidak terkendali. Jika ini terjadi maka sistim akan mengalami gangguan, dan mengalami umpan balik positif (jika gain dari sistim paling tidak adalah 1) dan akhirnya membawa pengendali keluar dari daerah kemampuan operasinya. Dengan demikian, untuk menjamin agar suatu sistim dapat selalu stabil, gain harus selalu lebih kecil dari 1 untuk sembarang frekuensi osilasi dimana penundaan menyebabkan pergeseran fasa sebesar 180°.
 Gambar 1.28. Bode Plot menunjukkan parameter-parameter kestabilan sistim
Gambar 1.28. Bode Plot menunjukkan parameter-parameter kestabilan sistim
Bode Plot adalah grafik yang digunakan untuk membantu menentukan apakah suatu sistim stabil atau tidak. Seperti yang ditunjukkan pada Gambar 1.28. Bode plot pada dasarnya adalah merupakan dua kurva yang menggunakan satu sumbu horizontal, yang merupakan besaran untuk frekuensi (dalam radian/detik). Grafik bagian atas menunjukkan bagaimana gain ikal tertutup berubah terhadap perubahan frekuensi, sedangkan grafik bagian bawah menunjukkan ketertinggalan fasa terhadap frekuensi. Kurva yang ditunjukkan pada Gambar 1.28 merupakan bentuk kurva yang umum ditemui. Kita dapat melihat bahwa sistim yang diwakili dalam Bode plot ini merupakan sistim yang stabil karena pada saat fasa tertinggal 180°, nilai gain lebih kecil dari 1 (tepatnya 0.3). Terdapat dua batasan yang menentukan kestabilan suatu sistim, yakni: gain margin dan fasa margin. Gain margin adalah gain margin aman (perbedaan antara nilai gain aktual dengan gain bersama) yang diambil pada frekuensi yang menyebabkan terjadinya pergeseran fasa sebesar 180°. Untuk sistim yang ditunjukkan pada Gambar 1.28, gain marginnya adalah 0.7 (1-0.3 = 0.7). Fasa margin adalah fasa margin aman yang diambil pada frekuensi yang menyebabkan gain menjadi = 1. Untuk sistim pada Gambar 1.28, fasa marginnya adalah 70° (180° - 110° = 70°).
132125676 © 2012