Sistem Kendali Logika Fuzzy
1.8. PENGENDALI LOGIKA FUZZY
Pendahuluan
Logika fuzzy merupakan suatu konsep yang relatif baru di dalam teori kendali. Konsep ini pada dasarnya hanya merupakan penerimaan kembali terhadap prinsip-prinsip yang telah ada dari awal kehidupan manusia: besaran-besaran dalam kehidupan manusia biasanya tidak berupa “seluruhnya atau tidak sama sekali” atau “hitam atau putih” tetapi merupakan besaran-besaran yang berada diantara hal-hal yang ekstrim. Sebagai contoh, jika kita memakan satu buah apel sedikit demi sedikit, pada keadaan mana buah apel tersebut dapat dikatakan bukan buah apel lagi? Setelah matahari terbenam, kapan tepatnya kita harus menyalakan lampu depan mobil kita?
Sistim kendali tradisional (PID) dapat menangani perubahan-perubahan masukan, namun penanganannya dilakukan dengan cara yang sangat bersifat satu dimensi, dalam hal ini hanya dengan menggunakan persamaan atau model matematis. Sebagai contoh, suatu pengendali proporsional dapat menanggapi suatu nilai dengan rentang antara 0 hingga 100%, namun cara penanganannya akan tetap sama, yakni melakukan perkalian dengan KP. Sebaliknya, pengendali-pengendali logika fuzzy dimodelkan mengikuti cara-cara berpikir alamiah dari manusia untuk memperoleh pemecahan suatu masalah:
- Kita menggunakan metode pemecahan masalah (aturan-aturan) yang berbeda-beda, tergantung kepada besarnya pemicu yang kita terima. Dengan kata lain, kita mungkin akan memiliki dua atau tiga jenis reaksi yang berbeda untuk suatu masalah umum yang sama, namun, reaksi tertentu yang kita pilih akan tergantung kepada pemicu atau alas an utama pada saat itu.
- Kita sering menggunakan lebih dari satu aturan pada waktu yang sama untuk suatu masalah tunggal, sehingga arah penyelesaian merupakan suatu kombinasi dari aturan-aturan tersebut, masing-masing diberikan bobot yang berbeda-beda sesuai dengan alas an yang ada.
- Kita menerima sekian banyak ketidak-tepatan yang mengarahkan kita untuk menemukan solusi yang dapat digunakan terhadap masalah-masalah yang tidak dapat didefenisikan dengan pasti dan dengan waktu berfikir yang lebih sedikit dari pada waktu yang diperlukan untuk memperoleh pemecahan yang tepat.
Mari kita tinjau point-point diatas dengan lebih detil. Point yang pertama: kita memakai metodologi pemecahan masalah yang berbeda untuk masalah yang sama, dengan kata lain seseorang memiliki pola pandang yang berbeda-beda untuk masalah umum yang sama.
Sebagai contoh, kita dapat memiliki aksi yang berbeda bila menghadapi suhu udara dingin, yang bisa kita rasakan sebagai suhu yang menyegarkan atau yang terlalu dingin untuk berlama-lama disana tanpa baju hangat. Untuk kondisi udara dingin yang menyegarkan kita mungkin akan membuka semua jendela dan menarik nafas dalam-dalam untuk menikmati kesegaran udara. Sedangkan yang kedua, kita mungkin akan mengenakan baju hangat untuk mengatasi rasa dingin akibat udara sekitar kita.
Point yang kedua, kita sering memakai lebih dari satu aturan untuk masalah yang sama pada saat yang bersamaan. Arah pemilihan penyelesaian yang kita pilih pada akhirnya merupakan gabungan atau kombinasi dari aturan-aturan tersebut, dan diberikan bobot yang berbeda-beda sesuai dengan alasan atau motivasi yang kita miliki. Sebagai contoh, pada saat suhu turun menjadi 65° F, kita mungkin akan merasakannya sebagai sesuatu yang terlalu dingin atau kita dapat merasakannya sebagai sesuatu yang menyegarkan; dalam hal ini kita akan mencari baju hangat jika kita merasa terlalu dingin.
Point yang ketiga: kita menerima sekian banyak ketidak-tepatan, yang merupakan hal yang sangat penting yang membantu kita untuk mencapai suatu pemecahan masalah. Tinjau masalah memarkirkan mobil. Kebanyakan orang dapat memarkirkan mobilnya dalam waktu 1 – 2 menit dan melakukannya dengan baik – mobil akan berada pada tempatnya. Namun, masalahnya akan berbeda jika kita diminta untuk memarkir mobil dengan persyaratan seperti 12 in dari batas aspal jalan. Tidak akan ada orang yang mampu untuk melaksanakan hal ini, jika tidak dibantu dengan memasang sensor jarak yang sesuai pada mobil yang akan diparkir tersebut. Tanpa alat Bantu, mungkin diperlukan waktu berbulan-bulan untuk dapat memarkir mobil dengan jarak yang tepat seperti yang ditentukan.
Sistim kendali (umumnya mekanisme servo) secara tradisional didasarkan kepada model matematika yang presisi (dan rumit). Walaupun demikian, dalam kenyataannya, sistim yang aktual tidak pernah merupakan representasi yang tepat dari modelnya (sistim-sistim yang nyata dipengaruhi oleh masalah-masalah non-linier yang tidak sepenuhnya dipahami); sehingga, waktu yang dipakai oleh pengendali untuk mendapatkan solusi yang pasti hingga suatu model hipotesa yang tidak akurat merupakan waktu yang tidak digunakan dengan baik dan yang juga tidak selamanya memberikan jawaban yang terbaik.
Suatu pengendali logika fuzzy meniru pengetahuan dan cara berpiikir dari seorang operator dalam mengendalikan sesuatu. Dalam hal ini, dengan menggunakan aturan-aturan kendali yang sesuai untuk situasi tertentu, yang saling tumpang tindih atau bahkan saling berlawanan satu dengan yang lainnya.
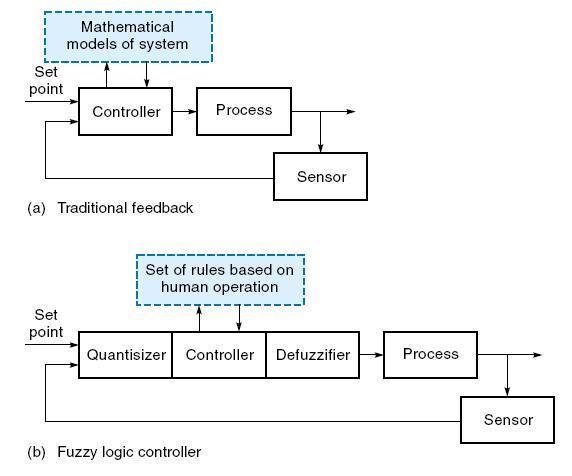 Gambar 1.37. Blok diagram sistim kendali tradisional dan logika fuzzy
Gambar 1.37. Blok diagram sistim kendali tradisional dan logika fuzzy
Keputusan akhir aksi yang harus diambil dikenal sebgai proses penilaian, yang merupakan kombinasi dari keseluruhan factor yang relevan. Gambar 1.37(a) menunjukkan suatu blok diagram dari sistim kendali umpan balik tradisional. Pengendali mengambil keputusan pengendalian berdasarkan model matematika dari suatu proses atau untuk kasus pengendali PID, digunakan suatu kumpulan hubungan-hubungan matematik yang tetap. Gambar 1.37(b) menunjukkan suatu blok diagram dari sistim kendali logika fuzzy. Dalam proses kerjanya, pengendali logika fuzzy menggunakan suatu kumpulan aturan-aturan yang ditetapkan dengan bantuan operator berpengalaman atau seorang ahli teknik dari sistim. Blok yang diberi nama “Quantisizer” mengambil data dari sensor dan mengubahnya menjadi dalam bentuk yang dapat digunakan oleh pengendali logika fuzzy.
Sebagai contoh, data dari sensor suhu dapat diubah dari besaran derajat menjadi predikat fuzzy seperti hangat, menyegarkan, dingin dan sangat dingin. Keluaran dari pengendali logika fuzzy merupakan suatu kumpulan atau suatu rentang respons. Walaupin demikian, karena aktuator memerlukan besaran sinyal yang spesifik, seperti tegangan listrik pada motor listrik, maka hal ini dilakukan oleh bagian “Defuzzifier” [Gambar 1.37(b)]. Blok ini akan memproses respons multilevel menjadi sinyal kendali yang spesifik (crisp) untuk aktuator.
Logika fuzzy pertama kali dikemukakan oleh L. A. Zadeh yang bekerja di Berkeley AS pada tahun 1965. Namun demikian, industri di Jepang yang mengembangkan ide ini hingga menjadi aplikasi kendali logika fuzzy yang berguna dalam kehidupan sehari-hari. Salah satu aplikasi utama kendali logika fuzzy digunakan untuk sistim kendali kereta api di kota Sendai, Jepang. Hasil kendali yang ditunjukkan oleh kendali fuzzy ternyata lebih baik dari unjuk kerja pengendali-pengendali tradisional. Sebagai contoh, gerbong kereta dengan pintu dapat berhenti dengan ketelitian tinggi pada pelataran stasiun, selain itu pada awal kereta bergerak/berjalan penumpang hampir tidak merasakan lonjakan akibat penngkatan kecepatan yang dilakukan oleh kereta. Contoh aplikasi lain adalah sistim transmisi gigi otomatis pada mobil-mobil Nissan, Honda, dan lain-lain. Penggunaan sistim ini pada mobil Nissan diklaim dapat mengurangi konsumsi bahan bakar sebesar 12-17%. Sistim transmisi konvensional dirancang berdasarkan kepada kecepatan tertentu dan kondisi mesin, yang menyebabkan sering terjadi proses pemindahan gigi. Pengemudi biasanya tidak terlalu sering melakukan perubahan gigi fan juga pemindahan gigi yang dilakukan tidak selalu pada kecepatan yang sama, terutama pada saat di tanjakan. Pengendali logika fuzzy yang digunakan pada mesin cuci mengatur banyaknya air, banyaknya sabun, waktu siklus berdasarkan seberapa kotor dan seberapa banyak pakaian yang dicuci.
Contoh Sistim Dengan Satu Input
Untuk memahami bagaimana pengendali logika fuzzy bekerja, tinjau suatu sistim kendali sederhana yang digunakan untuk mengatur suhu ruangan. Sistim ini terdiri dari ruangan, pemanas gas, sensor suhu dan pengendali logika fuzzy (Gambar 1.38). Pemanasan dengan pemanas gas diatur dengan memutar tombol dari posisi off ke on sepenuhnya, dimana tombol memiliki 10 skala dari posisi off hingga on penuh. Pengendali fuzzy akan mengambil contoh besarnya suhu yang diukur oleh sensor, dan selanjutnya berdasarkan sekumpulan aturan, pengendali akan melakukan pengaturan tombol gas. Dalam hal ini pengendali bertugas untuk mempertahankan suhu ruangan pada 70° F.
Untuk ringkasnya, didefenisikan hanya tiga kondisi suhu: hangat, sedang dan dingin. Setiap kondisi, dinyatakan pada Gambar 1.39(a), yang terlihat dalam bentuk segitiga dan disebut sebagai fungsi keanggotaan karena mewakili suatu rentang suhu yang masuk kedalam kategori yang sama. Sebagai contoh, kita dapat saja mengatakan bahwa (untuk ukuran manusia) suhu sedang (medium) berkisar antara 60 – 80° F, dalam rentang ini kita akan memilih suhu 70° F sebagai yang paling mendekati (nilai tengah rentang suhu sedang). Sedangkan suhu dibawah 66° dapat didefeniskan sebagai kategori dingin (cool). Terminologi medium dan cool disebut sebagai himpunan fuzzy karena batasan-batasan ini mengandung nilai-nilai dalam rentang tertentu. Perhatikan bahwa himpunan-himpunan fuzzy ini saling tumpang tindih (overlap) (contoh antara 60° dan 66°). Secara sederhana hal ini berarti bahwa suatu besaran suhu tertentu dapat merupakan anggota dari beberapa himpunan fuzzy. Contoh, dalam waktu yang sama dapat dikatakan bahwa suhu 64° “agak dingin” dan “termasuk medium juga”.
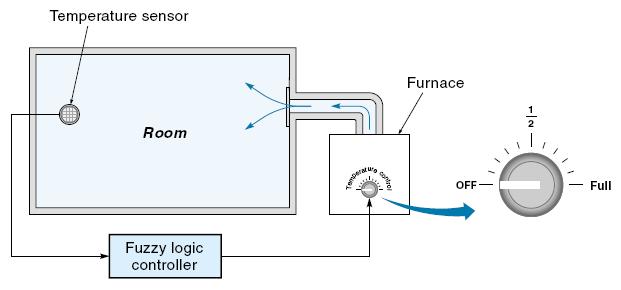 Gambar 1.38. Pengendali logika fuzzy digunakan untuk mengatur suhu ruangan
Gambar 1.38. Pengendali logika fuzzy digunakan untuk mengatur suhu ruangan
Pengendali fuzzy beroperasi berdasarkan sekumpulan aturan-aturan if-then (jika-maka), yang dinyatakan dalam bahasa sehari-hari manusia. Dalam contoh ini, kita dapat memiliki tiga aturan sebagai berikut:
Aturan 1: Jika suhu dingin, maka perbesar aliran gas.
Aturan 2: Jika suhu sedang, maka aliran gas tetap (OK)
Aturan 3: Jika suhu hangat, maka perkecil aliran gas.
Selanjutnya perlu didefenisikan nilai untuk “perbesar aliran gas” dan perkecil aliran gas”. Gambar 1.39(b) menunjukkan hal ini dalam grafik himpunan fuzzy. Disini kita dapat melihat bahwa segitiga untuk “perkecil aliran gas” berhubungan dengan pemutaran tombol gas ke kiri kearah posisi off (dari skala 1-5). Definisi untuk “aliran gas tetap (OK) berhubungan dengan mempertahankan kedudukan tombol gas atau paling banyak memutarnya satu skala dalam arah kiri ataupun kanan. Begitu juga dengan definisi “perbesar aliran gas” berhunbungan dengan pemutaran tombol gas ke kanan kearah on (dari skala 5-10). Dengan kedua grafik ini dan sekumpulan aturan-aturan maka pengendali fuzzy dapat dioperasikan. Sebagai contoh, jika suhu yang terukur pada sensor adalah 64°, maka blok quantisizer akan menentukan bahwa 64° adalah 20% dingin dan 40% medium [lihat Gambar 1.39(a)].
Hal ini berarti bahwa Aturan 1 memenuhi pada bobot 20%, Aturan 2 memenuhi pada bobot 40%, dan Aturan 3 tidak memenuhi (bobot 0%). Selanjutnya dibuat gambar grafik dengan besaran-besaran yang diatur sesuai keterpenuhan (bobot) aturan-aturan [Gambar 1.39(c)]. Walaupun demikian, tombol gas perlu dijalankan dengan perintah yang spesifik, sehingga perlu dilakukan proses defuzzifikasi terhadap himpunan keluaran, dalam hal ini, tujuannya untuk mencari suatu nilai rata-rata. Dalam kasus ini, diperoleh suatu hasil pada sumbu horizontal dimana luas daerah dibawah kurva adalah sama pada kedua sisi titik tersebut. Titik ini adalah titik pada posisi 1.86, yang berarti bahwa tombol gas harus diputar ke skala 1.86. Hal ini masuk akal karena pada suhu 64° F, agak terasa dingin sehingga diperlukan untuk menambah sedikit aliran gas ke pemanas.
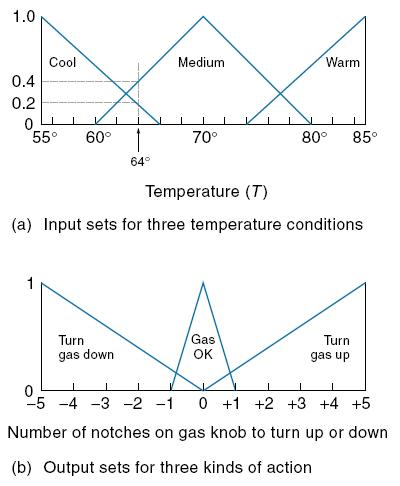
Catatan: Cool = dingin, Medium = sedang, Warm = Hangat
Gambar 1.39. Himpunan Input dan Output untuk Pengendali Logika Fuzzy dengan Satu Masukan (Input)
132125676 © 2012