UMPAN BALIK / FEEDBACK
Pengantar Sistim Kendali di Industri
Pengertian Dasar Sistim Kendali
Suatu sistim kendali terdiri dari suatu pengendali (controller) dan sistim yang dikendalikan (plant). Dalam hal ini sistim yang dikendalikan dapat berbentuk suatu mesin, kendaraan atau suatu proses di industri. Pengendali dapat berupa manusia yang memiliki keakhlian untuk mengawasi suatu proses, untuk sistim seperti ini, sistim kontrol yang digunakan merupakan cara kendali manual.
Aktuator atau penggerak diperlukan untuk berfungsi sebagai kendali antar muka antara sistim yang dikendalikan dengan pengendali, hal ini diperlukan agar aksi kendali dapat dilakukan. Sebagai tambahan, sistim pengukuran, detector dan sensor (alat-alat pengukur) diperlukan untuk menyediakan informasi kepada pengendali mengenai status dari sistim yang dikendalikan. Informasi yang dipertukarkan antara pengendali dengan sistim yang dikendalikan berbentuk sinyal listrik, sinyal penggerak pneumatic/hidrolik (udara/cairan bertekanan), penggerak mekanik dan lain-lain. Implementasi dari suatu sistim pengendali biasanya dilakukan secara elektronis, baik itu melalui rangkaian elektronik analog maupun rangkaian elektronik digital dalam bentuk penggunaan komputer digital (mikroprosesor). Selain itu, implementasi sistim kendali dalam bentuk sistim pneumatik dan hidrolik banyak juga ditemukan dalam aplikasi-aplikasi di industri. Sebagai Catatan, aktuator umum yang digunakan adalah yang digerakkan secara listrik, pneumatik, atau hidrolik, tergantung dari jenis aplikasi dan daya kerja yang diperlukan.
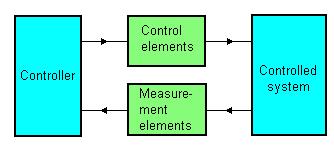
Gambar 1. Diagram Blok: Sistim Kontrol Dasar
Umpan Balik (Feedback)
Menyadari konsekuensi dari suatu aksi yang kita lakukan diperoleh melalui cara umpan balik. Sebagai contoh, kita berjalan dan sementara kita memperoleh umpan balik secara visual terhadap jalan atau arah yang harus kita tempuh serta kecepatan langkah kaki yang sesuai. Untuk contoh ini, umpan balik visual melalui indera penglihatan (mata) memberikan kemampuan kepada kita untuk mengatur kecepatan langkah-langkah kita sesuai alur jalan yang dilalui dan juga menghindari rintangan-rintangan atau halangan yang ditemui di jalan.
Umpan balik diperlukan didalam sistim kendali otomatis pada mana aksi kendali tergantung kepada hasil pengukuran status dari mesin atau proses yang dikendalikan. Dalam hal ini adalah kemampuan dari sistim kendali otomatis untuk menangani gangguan dan perubahan yang dialami oleh sistim yang dikendalikan.
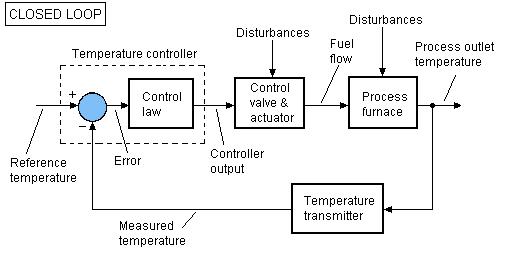
Gambar 2. Sistim Kontrol Loop Tertutup Menggunakan Umpan Balik
Sistim Kendali Sekuensial and Kuantitatif
Suatu sistim kendali sekuensial / berurut menggunakan fungsi-fungsi kendali logika pada mana sensor-sensor mengambil keadaan parameter dari sistim yang dikendalikan, yang dihasilkan hanya dalam bentuk sinyal ON/OFF. Sebagai contoh, suatu sistim pintu otomatis yang dilengkapi dengan saklar batas untuk mendeteksi posisi kedudukan pintu dan suatu sensor infra merah digunakan untuk mengetahui keberadaan orang yang ingin masuk yang berada di depan pintu. Aktuator dioperasikan sesuai dengan urutan operasi dan urutan waktu (timing) yang benar. Sistim kontrol berurut banyak digunakan di bidang-bidang otomatisasi pabrik, gudang dan kendali/pengawasan suatu proses tertentu.
Tujuan dari penggunaan sistim kendali kuantitatif berbeda dengan tujuan penggunaan sistim kendali berurut. Hal utama yang diperhatikan didalam penggunaan sistim kontrol berurut (sekuensial) adalah untuk mengendalikan nilai kuantitatif dari sistim-sistim yang dikendalikan. Dalam hal ini, data kuantitatif yang dikirimkan untuk mengendalikan sistim tidak hanya dalam bentuk sinyal ON/OFF. Pembagian antara sistim kendali sekuensial dan kuantitatif pada sistim-sistim tertentu kadang hamper tidak kelihatan dan juga pada sistim-sistim tertentu kedua jenis sistim kendali ini dipergunakan bersama-sama.
Tujuan Penggunaan Sistim Kendali Otomatis
Regulasi
Regulasi pada sistim kendali adalah merupakan suatu tugas dan fungsi untuk menjaga agar sistim yang dikendalikan berada pada suatu nilai yang diinginkan walaupun terjadi gangguan-gangguan dari luar sistim. Sistim yang melakukan fungsi ini disebut sebagai regulator.
Regulator melaksanakan aksi pengendalian yang bertujuan untuk mempertahankan keluaran dari sistim yang dikendalikan pada suatu nilai acuan dengan kesalahan keluaran yang minimum. Umpan balik merupakan hal yang mendasar untuk regulator
dapat menjalankan fungsinya. Hal ini disebabkan karena hanya dengan menggunakan cara umpan balik maka dapat diperoleh informasi mengenai keadaan sebenarnya dari keluaran sistim yang dikendalikan. Suatu regulator yang bagus akan mengurangi sampai tingkat terendah pengaruh-pengaruh yang disebabkan oleh perubahan-perubahan pada keluaran dari sistim yang dikendalikan.
Pengendali Penjejakan (Trajectory Following)
Sering suatu sistim kendali diperlukan untuk menghasilkan keluaran yang dapat mengikuti suatu sifat tertentu atau mengikuti alur/jejak tertentu. Sebagai contoh, suatu sistim servo dirancang khusus untuk mengikuti nilai acuan yang berubah-ubah. Sistim-sistim kendali servo banyak digunakan pada aplikasi-aplikasi sistim kendali di bidang transportasi, pertahanan dan sistim-sistim manufaktur.
Contoh Sistim Kendali: Pengendalian Dapur Pemanas Industri
Dapur pemanas di Industri dipergunakan untuk memanaskan bahan baku sebelum digunakan pada proses berikutnya. Sebagai contoh, dapur pemanas untuk sistim kilang minyak, dimana minyak mentah dipanaskan terlebih dahulu sebelum dialirkan ke bagian penyulingan untuk suling menjadi berbagai jenis minyak seperti avtur, bensin dan aspal, yang selanjutnya dapat dipasarkan. Tingkat penguapan minyak mentah yang dipanaskan dikendalikan dengan teliti dikarenakan proses penyulingan untuk memperoleh setiap jenis minyak sangat tergantung kepada panas dan suhu yang diberikan selama proses penyulingan.
Diagram yang disederhanakan dari proses pemanasan minyak mentah ditunjukkan pada Gambar 3. Suhu dari minyak mentah yang diproses diukur tepat pada saluran keluar dari dapur pemanas dengan menggunakan sensor suhu, yang selanjutnya data suhu ini dikirimkan kepada alat pengendali suhu. Nilai acuan atau besarnya suhu yang diinginkan diatur dengan menggunakan alat pengatur suhu pada sistim kendali. Perbandingan antara suhu yang terukur dengan besarnya suhu yang dijadikan sebagai nilai acuan dikirimkan ke pengendali suhu dan sebagai hasilnya pengendali suhu akan mengatur bukaan katup bahan bakar yang mengalir ke alat pemanas. Aturan kendali menentukan relasi yang tepat antara perbedaan suhu dengan besarnya tingkat bukaan katup bahan bakar.
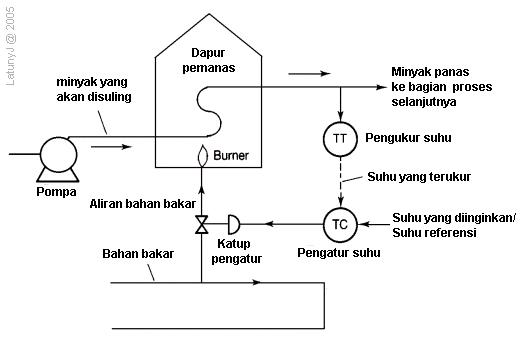
Figure 2. Prinsip Kendali Dapur Pemanas Penyulingan Minyak Mentah
Diagram blok dari sistim kendali pemanas minyak mentah yang dijelaskan diatas ditunjukkan pada Gambar 2. Sumber utama gangguan terhadap operasi pengaturan suhu proses pemanasan berasal dari sedikit banyaknya aliran minyak mentah yang masuk ke dapur pemanas. Dalam hal ini, sedikit atau banyaknya minyak yang masuk ke pemanas untuk proses penyulingan dipengaruh oleh hal-hal seperti, tinggi rendahnya permintaan pasar terhadap minyak yang dihasilkan, sedangkan fluktuasi permintaan pasar disebabkan oleh keadaan harga minyak mentah dan jumlah cadangan minyak atau perubahan cuaca misalnya musim dingin dimana diperlukan banyak energi panas dari generator listrik yang menggunakan bahan bakar minyak untuk memanaskan ruangan.