SIstem Kendali ON-OFF
1.2. Pengendali ON-OFF
Kendali Dua Nilai
Kendali dua nilai (juga disebut kendali on-off) merupakan strategi kendali ikal tertutup yang paling sederhana. Dalam hal ini, aktuator dapat menghasilkan nilai variabel (besaran) yang dikendalikan dalam keadaan tenaga penuh atau tanpa tenaga sama sekali. Pada saat aktuator off, besaran yang dikendalikan kembali posisi awalnya semula. Contoh dari sistim kendali jenis ini adalah sistim pemanas yang dikendalikan oleh thermostat. Tinjau suatu ruangan dengan sistim pemanasan off, dan suhu luar ruangan 50° F. Setelah beberapa saat suhu ruangan akan turun menjadi sama besar dengan suhu luar yakni sebesar 50° F. Ini merupakan suhu ruangan dalam kesetimbangan. Jika kemudian sistim pemanas ruangan diaktifkan (on) dan termostat diatur untuk bekerja pada suhu rata-rata 70° F. Seperti yang ditunjukkan pada Gambar 11.2; suhu dalam ruangan mulai meningkat, dengan cepat pada awalnya, dan kemudian melambat (disebabkan proses kehilangan panas mulai meningkat). Pada saat suhu mencapai titik henti 72° F, pemanas dimatikan. Suhu ruangan dengan segera akan menurun menuju titik kesetimbangan 50° F; namun jauh sebelum mencapai titik tersebut, suhu mencapai titik henti bawah pada 68° F, pada kondisi ini pemanas dihidupkan kembali. Perhatikan bahwa kurva suhu mirip dengan bentuk kurva pengisian dan buang muatan dari suatu kapasitor. Kapasitas pemanasan yang besar dari pemanas akan membuat kurva suhu pemanasan (charging/pengisian) lebih curam, dan ukuran ruangan yang besar akan membuat kurva suhu untuk pendinginan (discharging/buang muatan) juga semakin curam (karena suhu dalam ruangan turun dengan cepat). Perhatikan juga bahwa suatu besaran berupa waktu siklus (TCYC) diasosiakan dengan sistim kendali on-off. Waktu siklus ini dipengaruhi oleh kapasitas pemanas dan luas ruangan, juga oleh perbedaan suhu titik-titik henti on (cut-on) dan henti off (cut-off). Jika batasan-batasan ini semakin diperkecil perbedaannya maka suhu akan dapat dipertahankan lebih mendekati 70° F, namun hal ini menyebabkan frekuensi siklus meningkat, seperti yang diperlihatkan pada Gambar 11.4(b). Umumnya, suatu siklus yang tinggi tidak baik karena dapat merusakkan motor dan saklar. Dengan demikian sistim kendali on-off memiliki keterbatasan sehingga hanya cocok untuk dipergunakan guna mengendalikan sistim-sistim yang berubah dengan lambat dan dimana hanya diperlukan kondisi dimana variabel yang dikendalikan hanya berubah dalam batas dua titik henti.
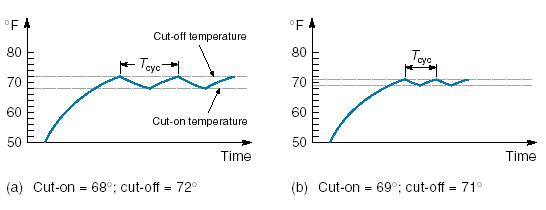
Gambar 1.4, Kurva suhu dari sistim pemanas dengan kendali on-off
Kendali Tiga-Posisi
Kendali tiga posisi mirip dengan kendali dua posisi, kecuali untuk kendali jenis ini memiliki tiga keadaan operasi, misalnya maju-off-mundur, (atau naik-off-turun, panas-off-dingin, dan lain-lain). Strategi kendali ini digunakan pada suatu sistim yang tidak memiliki suatu keadaan kesetimbangan khusus, sebagai contoh, tinjau suatu instalasi pengeboran minyak yang mengapung di permukaan laut, yang perlu diatur untuk mempertahankan menara pengeboran agar tetap tegak lurus sumur minyak yang terdapat di dasar laut. Platform pengeboran tidak boleh bergeser lebih dari 5 m dari posisi tengah sumur minyak, karena hal ini akan menyebabkan patahnya pipa pengeboran. Dua motor listrik, motor A dan motor B digunakan untuk mempertahankan platform agar tetap berada pada posisi center dalam arah timur-barat (arah utara-selatan juga diatur oleh motor-motor yang lainnya).
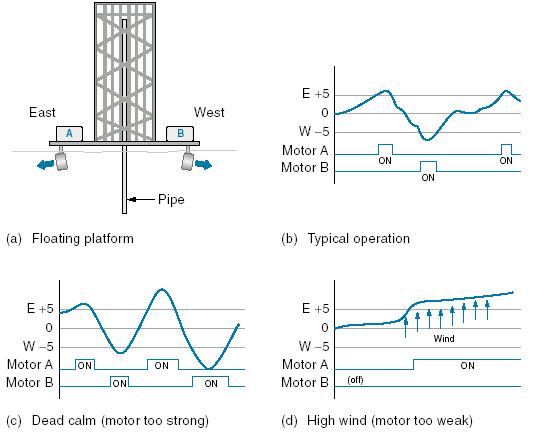
Gambar 1.5. Contoh sistim kendali tiga-posisi
Jika platform bergeser lebih dari 5 meter kearah barat, maka motor A aktif dan mendorong platform kembali ke arah center. Motor B akan aktif bila platform bergeser lebih dari 5 meter ke arah timur. Gambar 11.5(b) menunjukkan contoh kurva pergerakan dalam arah timur-barat dari platform pengeboran. Perhatikan bahwa variabel yang dikendalikan (posisi dari platform) cenderung mengalami osilasi turun-naik sepanjang garis pusat platform disebabkan oleh pemilihan tenaga motor yang didasarkan pada kondisi terburuk (misalnya pada kondisi angin yang bertiup kencang). Dalam kondisi cuaca yang tenang, periode on dari motor A yang singkat dapat memberikan momentum yang cukup untuk mendorong platform melewati daerah kesetimbangannya, yang kemudian didorong kembali oleh motor B. Dalam kenyataannya jika sistim tidak dirancang dengan baik, maka gerakan osilasi maju-mundur akan dapat menjadi semakin besar sehingga menuju keadaan yang tidak stabil seperti ditunjukkan pada Gambar 11.5(c). Sebaliknya, jika kekuatan angin terlalu besar untuk dapat dilawan oleh motor maka platform akan didorong melewati batas 5 m, yang dapat menyebabkan patahnya pipa-pipa pengeboran. Sistim kendali tiga posisi merupakan sistim kendali sederhana yang hanya cocok untuk aplikasi-aplikasi dalam jumlah terbatas, salah satunya seperti kendali posisi platform yang telah dibahas.
132125676 (c) 2012