Sistem Kendali Proporsional
1. 3. KENDALI PROPORSIONAL
Tinjauan sekarang diarahkan kepada strategi-strategi pengendalian yang memerlukan penggunaan pengendali-pengendali “pintar” yang menggunakan op-amp atau mikroprosesor. Strategi kendali yang pertama dan yang merupakan dasar untuk jenis pengendali jenis ini dikenal sebagai kendali proporsional (proportional control). Pada kendali proporsional, aktuator akan mengerjakan tenaga koreksi yang proporsional dengan besarnya tingkat kesalahan (error) yang terjadi, seperti yang dinyatakan pada persamaan 1.1
![]() (1.1)
(1.1)
dimana: Output = keluaran pengendali dalam bentuk kendali proporsional (mis. gaya koreksi)
KP = konstanta untuk sistim kendali proporsional, disebut gain
E = error, selisih antara nilai variabel yang dikendalikan yang diinginkan dengan nilai aktual yang terjadi.
Tinjau suatu sistim kendali posisi seperti yang ditunjukkan pada Gambar 1.6. Suatu lengan robot digerakkan oleh motor/sistim roda gigi. Sebuah potensiometer memberikan informasi posisi, yang kemudian diberikan kepada sebuah komparator. Sinya umpan-balik (feedback) ini disebut sebagai variabel proses (PV). Komparator akan mengurangkan nilai PV dari nilai set point (SP) untuk menentukan besarnya nilai error (E) seperti yang dinyatakan melalui Persamaan 1.2.
E = SP – PV (1.2)
Dimana:
E = error (kesalahan)
SP = set point, besaran yang diinginkan variabel yang dikendalikan
PV = Variabel proses, nilai aktual dari variabel yang dikendalikan
Mengacu ke Persamaan 1.1, dapat dilihat bahwa keluaran dari pengendali adalah berbanding lurus (proporsional) dengan error (kesalahan) yang terjadi. Keluaran ini mengarahkan motor untuk berputar dalam arah yang dapat mengurangi error. Pada keadaan dimana posisi lengan robot mendekati posisi set point, error semakin berkurang, yang juga menyebabkan arus listrik yang diberikan kepada motor semakin mengecil, hingga akhirnya tidak ada arus listrik lagi pada saat lengan robot mencapai posisi set point yang diinginkan.
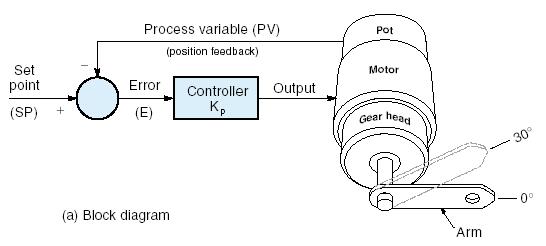

Gambar 1.6. Kendali proporsional untuk posisi
Contoh 11.1
Anggap bahwa suatu lengan robot yang digerakkan oleh motor awalnya berada pada 0° dan digerakkan ke posisi baru pada 30°. Gain dari sistim adalah Kp = 2 in. .oz/deg. Jelaskan bagaimana pengendali menangani kondidi ini.
Jawab
Sistim diperlihatkan pada Gambar 1.6. Pada keadaan awal lengan berada dalam keadaan diam pada posisi 0°. Pada saat set point mulai diubah ke 30°, sinyal kesalahan (error) sebesar 30° terjadi (disebabkan karena lengan masih berada sejauh 30° dari posisi yang dikehendaki).
Error = SP – PV = 30° - 0° = 30°
Dengan menggunakan Persamaan 11.1, dapat dihitung torsi penggerak awal yang akan dihasilkan oleh sistim:
OutputP = KPE = 2 in.oz/deg x 30° = 60 in . oz
Hal in berarti bahwa motor pada awalnya akan digerakan untuk menghasilkan torsi sebesar 60 in.oz, menyebabkan lengan bergerak naik dengan cepat. Selama lengan bergerak naik, output dari pengendali perlahan mengecil [Gambar 1.6 (b)], pada saat lengan berada pada posisi 10° diperoleh
Error = SP – PV = 30° - 10° = 20°
OuputP = KPE = 2in.oz/deg x 20° = 40 in.oz
Tenaga torsi dari motor berkurang menjadi 40 in. oz, lengan akan mulai bergerak lebih lambat, pada saat lengan mencapai posisi 25° diperoleh
Error = SP – PV = 30° - 25° = 20°
OutputP = KPE = 2in.oz/deg x 5° = 10 in.oz
Dengan hanya tenaga torsi sebesar 10 in.oz gerak lengan akan semakin melambat lagi. Akhirnya, pada saat lengan robot mencapai posisi set point pada 30°. Maka
Error = SP – PV = 30° - 30° = 0°
OutputP = KPE = 2in.oz/deg x 0° = 10 in.oz
Dengan torsi 0 in. oz maka lengan robot berhenti ditempat.
Hubungan yang proporsional terhadap error yang terjadi sesuai dengan logika bahwa error yang besar berarti bahwa posisi yang hendak dicapai masih jauh, sehingga diperlukan gerakan yang cepat untuk mencapainya (dalam hal ini diperlukan torsi yang besar dari motor). Selanjutnya, pada saat error mengecil, lengan akan melambat (torsi mengecil), hal ini untuk mencegah terjadinya lonjakan (melewati posisi tujuan). Sistim kendali proporsional bersifat bi-directional (dua arah) dalam artian arah torsi yang dipergunakan dapat dalam arah apa saja yang diperlukan untuk memperkecil nilai error. Sebagai contoh, tinjau kembali sistim pada Gambar 1.6 (Contoh 1.1). Pada saat lengan diarahkan ke posisi 30°, pengendali akan menghasilkan sinyal ke motor yang berhubungan dengan besar torsi 60 in. oz. Berikutnya, jika motor digerakan untuk kembali ke posisi 0°, maka nilai error negatif akan terjadi, hal ini menyebabkan torsi yang dihasilkan oleh motor menjadi
Error = SP – PV = 0° - 30° = -30°
OutputP = KPE = 2 in. oz/deg x -30° = -60° in. oz
Tanda negatif dari output akan menyebabkan terjadinya perubahan polaritas (kutub) tegangan yang dipakai pada motor, yang dapat memutar motor dalam arah yang berlawanan. Jadi kendali proporsional memiliki kemampuan untuk menggerakan lengan dalam dua arah gerak.
132125676 (c) 2012